Boresight Callibration dan Strip Adjustment dalam LiDAR
Dalam dunia pemetaan,
Kesalahan kecil pada salah satu komponen ini dapat berdampak pada akurasi point cloud. Sebagai contoh, kesalahan sudut hanya beberapa derajat pada IMU dapat menyebabkan titik-titik LiDAR bergeser beberapa sentimeter hingga meter, terutama pada objek tinggi seperti bangunan, tiang, atau lereng curam. Dampaknya, bentuk objek terlihat miring, garis tepi tidak sejajar, dan data antar jalur terbang (strip) tidak saling bertemu dengan baik pada area overlap. Di sinilah peran boresight callibration dan strip adjustment menjadi sangat penting.
Apa Itu Boresight Callibration?
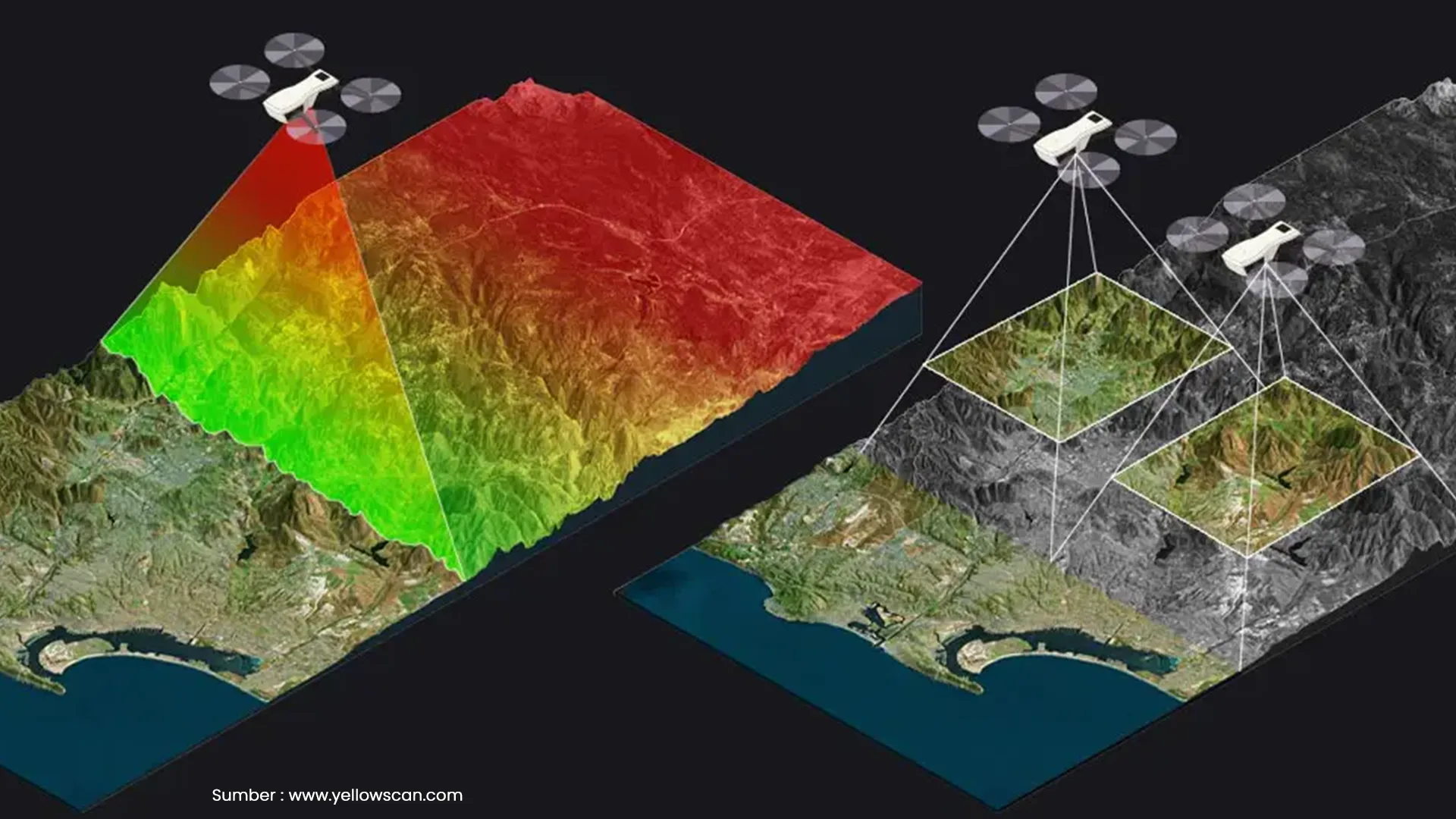
Bore sight calibration adalah proses penyelarasan sudut orientasi antara sensor LiDAR dan sistem navigasi yang terdiri dari IMU/INS dan GNSS. Dalam sistem survei pemetaan LiDAR, setiap titik hasil pengukuran laser dihitung berdasarkan posisi dan orientasi sensor pada saat pemotretan. Oleh karena itu, kesesuaian sudut antara LiDAR dan IMU menjadi faktor yang sangat krusial.
Ketidaktepatan sudut ini dikenal sebagai boresight misalignment, yang biasanya terjadi pada tiga parameter utama, yaitu pitch, roll, dan yaw. Meskipun nilainya sangat kecil, kesalahan boresight dapat menyebabkan pergeseran posisi titik LiDAR yang signifikan, terutama pada area dengan elevasi tinggi atau objek vertikal. Akibatnya, data spasial tidak lagi merepresentasikan kondisi sebenarnya di lapangan.
Melalui bore sight calibration, parameter sudut tersebut dikoreksi sehingga integrasi antara LiDAR, IMU/INS, dan GNSS menjadi lebih presisi. Proses ini umumnya dilakukan menggunakan area uji tertentu dengan jalur terbang khusus agar kesalahan sudut dapat teridentifikasi dan diminimalkan. Dengan bore sight calibration yang baik, kualitas point cloud akan meningkat secara signifikan dan memenuhi standar akurasi survei pemetaan.
Apa itu Strip Adjustment?
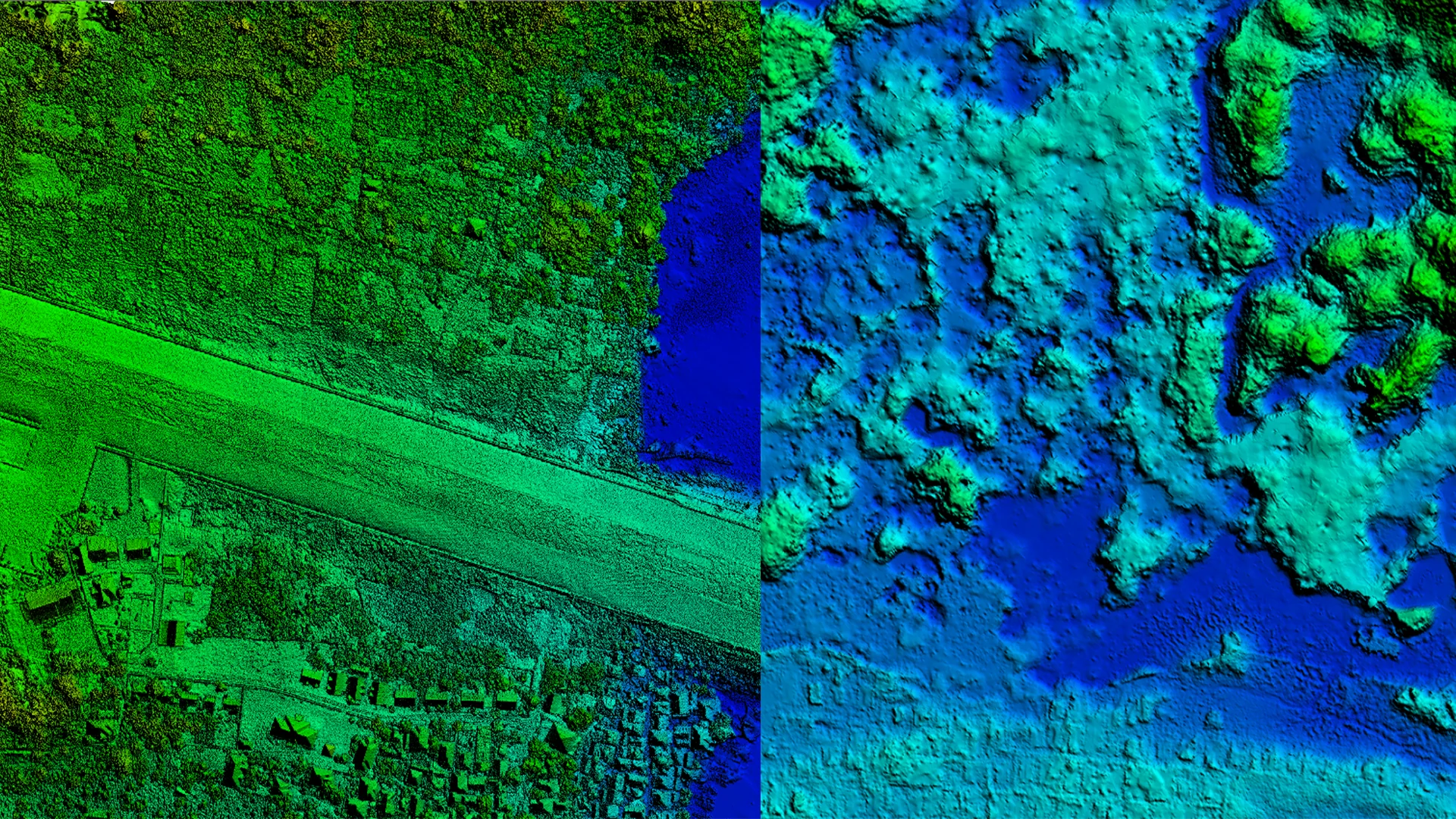
Setelah bore sight calibration dilakukan, masih dimungkinkan muncul perbedaan kecil antar jalur terbang LiDAR (strip), khususnya pada area overlap. Perbedaan ini dapat disebabkan oleh variasi kondisi penerbangan, dinamika platform, atau misi kalibrasi yang kurang optimal. Jika tidak diperbaiki, perbedaan antar strip akan terlihat jelas dalam bentuk permukaan yang tidak sejajar atau objek yang tampak terbelah. Untuk mengatasi hal tersebut, dilakukan strip adjustment. Strip adjustment merupakan proses penyelarasan antar strip LiDAR agar seluruh point cloud membentuk satu kesatuan data yang konsisten. Proses ini bekerja dengan menyesuaikan posisi dan orientasi relatif antar jalur terbang berdasarkan area overlap yang saling beririsan.
Penting untuk dipahami bahwa strip adjustment bukan pengganti bore sight calibration, melainkan tahap lanjutan untuk menyempurnakan hasil. Bore sight calibration berfokus pada kesalahan sistemik antara sensor, sedangkan strip adjustment menangani ketidaksesuaian antar jalur terbang. Kombinasi keduanya menghasilkan data LiDAR dengan tingkat akurasi dan presisi tinggi, sehingga siap digunakan untuk berbagai kebutuhan survei pemetaan dan analisis spasial.